BIOMHXANIKA ΗΛΕΚΤΡΟΝΙΚΑ
ΕΡΓΑΣΤΗΡΙΑΚΗ ΑΣΚΗΣΗ
ΗΛΕΚΤΡΟΝΙΚΟΣ ΕΛΕΓΧΟΣ ΤΡΙΦΑΣΙΚΟΥ
ΕΝΑΛΛΑΣΣΟΜΕΝΟΥ ΚΙΝΗΤΗΡΑ
Καθηγητής: Στέφανος Μανιάς
1.
Θεωρία
Ο έλεγχος ταχύτητας ενός
εναλλασσόμενου κινητήρα επιτυγχάνεται μέσω ελέγχου της τάσης που εφαρμόζεται
στα άκρα του. Εάν μεταβάλλουμε την RMS τιμή της τάσης του
τότε μεταβάλλουμε και την ταχύτητα του. Εάν μεταβάλλουμε την συχνότητα της
τάσης του τότε επίσης μεταβάλλουμε την ταχύτητα του. Ο καλύτερος τρόπος ελέγχου
ενός εναλλασσόμενου κινητήρα είναι να μεταβάλλουμε την ίδια στιγμή την RMS
τιμή της τάσης του και την συχνότητα αυτής έτσι ώστε να μπορέσουμε να πετύχουμε
μέγιστη δυνατή ροπή από την κινητήρα. Για να πετύχουμε μέγιστη δυνατή ροπή στον
κινητήρα μεταβάλουμε την RMS τιμή της τάσης του κινητήρα
και την συχνότητα αυτής έτσι ώστε ο λόγος ![]() . Επομένως, αυτό που χρειαζόμεθα
είναι να δημιουργήσουμε μία ηλεκτρονική γεννήτρια ισχύος η οποία στην
έξοδο της να παρέχει μία εναλλασσόμενη τάση μεταβλητής RMS τιμής και
μεταβλητής συχνότητας. Μια τέτοια γεννήτρια παρουσιάζεται στο σχήμα 1.
. Επομένως, αυτό που χρειαζόμεθα
είναι να δημιουργήσουμε μία ηλεκτρονική γεννήτρια ισχύος η οποία στην
έξοδο της να παρέχει μία εναλλασσόμενη τάση μεταβλητής RMS τιμής και
μεταβλητής συχνότητας. Μια τέτοια γεννήτρια παρουσιάζεται στο σχήμα 1.
Σχήμα 1 Σύστημα Ηλεκτρονικού Ελέγχου Εναλλασσόμενου
Κινητήρα.
Όπως βλέπουμε από το
παραπάνω σχήμα η εναλλασσόμενη τάση δικτύου γίνεται συνεχή (DC)
και στη συνέχεια μέσω του αντιστροφέα γίνεται πάλι εναλλασσόμενη αλλά αυτή τη
φορά μεταβλητής RMS τιμής και συχνότητας και στην συνέχεια εφαρμόζεται
στον κινητήρα του οποίου μπορεί να ελέγχει την ταχύτητα του. Ο συγκεκριμένος
αντιστροφέας αποτελείται από τέσσερις ημιαγωγικούς διακόπτες οι οποίοι μπορεί
να είναι τρανζίστορ ισχύος, MOSFET ισχύος, θυρίστορ, GTO,
IGBT ή κάποιο άλλο ημιαγωγικό διακόπτη ανάλογα με τις
απαιτήσεις ισχύος του εναλλασσόμενου κινητήρα. Οι διακόπτες λειτουργούν είτε
στην περιοχή κορεσμού είτε στην περιοχή αποκοπής.
Το άνοιγμα και κλείσιμο των
ημιαγωγικών διακοπτών γίνεται μέσω προγραμματισμού ενός μικροεπεξεργαστή ή ενός
Ψηφιακού Επεξεργαστή Σήματος (Digital Signal Processor, DSP). Επομένως, μέσω
ψηφιακών επεξεργαστών και χρησιμοποιώντας το κατάλληλο Software μπορούμε να πετύχουμε
διάφορους αλγορίθμους ρύθμισης της τάσης εξόδου του αντιστροφέα (π.χ. V/F
=σταθερός) και κατά συνέπεια να έχουμε τη δυνατότητα ελέγχου διαφόρων
παραμέτρων του κινητήρα (π.χ. ταχύτητα, ροπή, ρεύμα, τάση κ.α.). Στο σχήμα 2
παρουσιάζονται διάφορες τάσεις εξόδου του αντιστροφέα για διάφορους παλμού
έναυσης των ημιαγωγικών διακοπτών που προέρχονται από ένα μικροεπεξεργαστή.
Σχήμα 2 Τάσεις εξόδου αντιστροφέα για διάφορους παλμούς οδήγησης των ημιαγωγικών διακοπτών.
Εδώ θα πρέπει να σημειώσουμε ότι επειδή οι κυματομορφές του σχήματος 2 περιέχουν αρμονικές συνιστώσες σε χαμηλές συχνότητες δημιουργούν παρασιτικές ροπές με συνέπεια την κακή λειτουργία του κινητήρα. Για το λόγο αυτό η σημερινής τεχνολογίας αντιστροφείς παράγουν στην έξοδό τους μια τέτοια τάση η οποία να είναι απελευθερωμένη από αυτές τις αρμονικές. Μια τέτοια τάση (SPWM) παρουσιάζεται στο σχήμα 3.
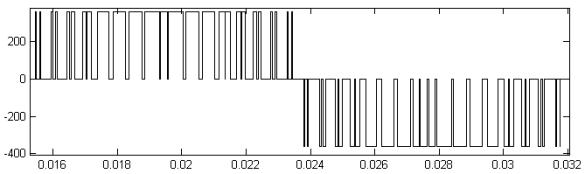
Σχήμα 3 Κυματομορφή τάσης διαμορφωμένη κατά ημίτονο (SPWM).
Στο σχήμα 4 παρουσιάζεται
ένα σύστημα ηλεκτρονικού ελέγχου ενός εναλλασσόμενου κινητήρα. Όπως βλέπουμε οι
παλμοί έναυσης των ημιαγωγικών διακοπτών του αντιστροφέα (inverter) δημιουργούνται από ένα μικροεπεξεργαστή ο οποίος είναι μέρος του
κυκλώματος ελέγχου του αντιστροφέα. Ο προγραμματισμός αυτού του
μικροεπεξεργαστή γίνεται μέσω ενός Ηλεκτρονικού Υπολογιστή όπως φαίνεται και
από το σχήμα 4. Επομένως, εάν χρειασθεί να αλλάξουμε κάποιες παραμέτρους του
ηλεκτρονικού συστήματος κίνησης αυτό μπορεί να γίνει μέσω του πληκτρολογίου.
Για την επικοινωνία του Ηλεκτρονικού Υπολογιστή με τον μικροεπεξεργαστή του
αντιστροφέα χρησιμοποιείται το πρόγραμμα Frepas. Θα πρέπει να
σημειώσουμε ότι συστήματα όπως αυτό του σχήματος 4 χρησιμοποιούνται στην
ρομποτική, στη βιομηχανική παραγωγή, στα ηλεκτρικά τρένα, ηλεκτρικά αυτοκίνητα,
στους ταινιόδρομους, στις εργαλειομηχανές και σε πολλές άλλες εφαρμογές. Τα
Συστήματα Ηλεκτρονικού Ελέγχου Κινητήρων αποτελούν τη βασική υποδομή για την
εκτέλεση διαφόρων διαδικασιών της βιομηχανικής παραγωγής.
Σχήμα 4 Συνδεσμολογία λειτουργίας του
αντιστροφέα με τη χρήση του Ηλεκτρονικού Υπολογιστή.
2.
Γενικές πληροφορίες για το πρόγραμμα Frepas
To πρόγραμμα υποστηρίζει τα serial interfaces FR-CU03/FR-EPG της σειράς αντιστροφέων FR-A της Mitsubishi.
Η χρήση του προγράμματος πρέπει να γίνεται για τη ρύθμιση και την αλλαγή των παραμέτρων, και όχι για τη συνεχή λειτουργία με τους αντιστροφείς. Ο χρήστης μπορεί να αποθηκεύσει διάφορα σετ παραμέτρων, τα οποία να φορτώνει ανάλογα με την εφαρμογή. Επιπλέον είναι δυνατόν να προσθέσει σχόλια και να τυπώσει τον πίνακα με τις τιμές των παραμέτρων.
Η σύνδεση 32 αντιστροφέων κατά μέγιστο είναι δυνατή με τη σειριακή επικοινωνία. Ο χρήστης μπορεί να επιλέξει με ποιον αντιστροφέα θέλει να επικοινωνήσει, δηλαδή σε ποιον αντιστροφέα θέλει να διαβάσει και να γράψει τα δεδομένα. Επίσης, είναι δυνατόν να σταλεί ένα σετ παραμέτρων σε μια ομάδα αντιστροφέων ταυτόχρονα.
Η λειτουργία εν γένει είναι δυνατή τόσο με το γραφικό "εικονικό" PU – Parameter Unit (με τον ίδιο τρόπο όπως και με το πραγματικό PU) όσο και με αλλαγή της λίστας των παραμέτρων.
Σχήμα 4 Αρχικό παράθυρο του προγράμματος
FREPAS με όλες τις επιλογές χειρισμού.
3. Περιγραφή
Λειτουργίας Προγράμματος FREPAS
Εισαγωγή παραμέτρων:
Η εισαγωγή των παραμέτρων
στον αντιστροφέα γίνεται με 2 τρόπους:
A.
Μέσα από το παράθυρο "Parameter Database". Εκεί
παρουσιάζονται αναλυτικά οι παράμετροι, το είδος της λειτουργίας που ελέγχουν,
οι επιτρεπτές τιμές που μπορούν να λάβουν με τη σχετική ακρίβεια ρύθμισης, η
εργοστασιακή τους (default) ρύθμιση, και η ρύθμιση του χρήστη. Δίνοντας
"Read Parameter", o H/Y επικοινωνεί με τον αντιστροφέα και διαβάζει
τις ήδη προγραμματισμένες τιμές. Μετά από τις επιθυμητές αλλαγές, δίνουμε
"Send Parameter" ώστε οι νέες παράμετροι να σταλούν στον αντιστροφέα
Online. Βοήθεια σχετικά με τις παραμέτρους παρέχεται πατώντας "F1".
Σχήμα 5 Προσδιορισμός παραμέτρων από το παράθυρο “PARAMETRE DATABASE”
Β. Με το εικονικό
χειριστήριο FR-PU03. Πληκτρολογούμε: SET + <αριθμό παραμέτρου> +
READ. Στο χειριστήριο φαίνεται η ισχύουσα ρύθμιση. Δίνουμε την επιθυμητή τιμή
με το αριθμητικό πληκτρολόγιο του χειριστηρίου και στη συνέχεια WRITE. Η
ρύθμιση αναβοσβήνει εάν έχει γίνει σωστά.
|
|
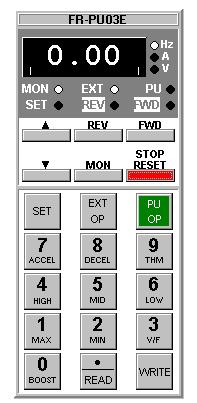
Σχήμα 6 Εικονικό χειριστήριο FR-PU03.
Βασικές
παράμετροι:
|
Παρ. |
Λειτουργία |
Περιγραφή |
|
0 |
Torque boost (manual) |
Ενίσχυση της ροπής (δηλαδή της τάσης εξόδου) στην περιοχή χαμηλών
συχνοτήτων, για βελτίωση της επιτάχυνσης. |
|
1 2 |
Upper limit frequency Lower limit frequency |
Ψαλιδισμός του ανώτερου και κατώτερου όριου των συχνοτήτων εξόδου.
(Για ρύθμιση συχνότητας άνω των 120 Hz, χρησιμοποίησε την παρ. 18.) Προσοχή: Εάν η τιμή της παρ.2 (lower limit frequency) είναι μεγαλύτερη ή ίση
της παρ. 13 (starting frequency), η αρχική συχνότητα εξόδου θα είναι η
προκαθορισμένη συχνότητα (starting frequency), αν δοθεί η εντολή εκκίνησης
FWD. |
|
3 19 |
Base frequency Base frequency voltage |
Ονομαστική συχνότητα (εάν δεν είναι 50 Hz) και ονομαστική τάση
κινητήρα. Η PWM έξοδος μεταβάλλεται για βέλτιστη απόδοση. · Εάν ‘παρ.19’ = 9999 (εργοστασιακή ρύθμιση), τότε:
μέγιστη τάση εξόδου = τάση τροφοδοσίας. · Εάν χρησιμοποιείται διανυσματικός έλεγχος
μαγνητικής ροής (παρ. 80), τότε η παρ. 3 αγνοείται και χρησιμοποιούνται τα 50
Hz. · Εάν ‘παρ. 19’ = 8888 και έχει επιλεγεί
διανυσματικός έλεγχος, τότε για τους υπολογισμούς χρησιμοποιείται η τιμή των
240 V. Αλλιώς χρησιμοποιείται η τιμή της παρ. 19. |
|
7 8 20 |
Acceleration time Deceleration time Reference frequency for
acceleration/deceleration |
Η παρ. 7 περιέχει το χρόνο επιτάχυνσης, μέσα στον οποίο η συχνότητα
αυξανόμενη γραμμικά από τα 0 Hz θα έφτανε τη συχνότητα αναφοράς της παρ. 20.
(Η συχνότητα λειτουργίας γενικά δεν αντιστοιχεί στην παρ. 20.) Όμοια η παρ.8
για το χρόνο επιβράδυνσης. · To "0" ως χρόνος επιτάχυνσης /
επιβράδυνσης, αντιστοιχεί σε 0.04 sec. · Εάν έχει επιλεγεί μορφή επιτάχυνσης S (παρ. 29), ο
χρόνος της παρ. 7 αντιστοιχεί στον χρόνο για να φτάσουμε τη βασική συχνότητα
(παρ. 3). |
|
9 |
Electronic thermal overload relay |
Χρησιμοποιείται για τη θερμική προστασία του κινητήρα με εισαγωγή της
ονομαστικής έντασης ρεύματος πλήρους φορτίου. Λαμβάνεται υπόψη η μειωμένη
ψύξη του κινητήρα στις χαμηλές συχνότητες. · Το "0" εξουδετερώνει τη θερμική
προστασία. Η προστασία του transistor εξόδου του αντιστροφέα ισχύει ακόμα. |
|
10 11 12 |
DC injection braking frequency DC injection braking time DC injection braking voltage |
Ρύθμιση της δυναμικής πέδησης με έγχυση DC ρεύματος. Εισάγεται η
συχνότητα ενεργοποίησης της πέδησης, ο χρόνος πέδησης. και η τάση πέδησης. |
|
13 |
Starting frequency |
Η συχνότητα εκκίνησης μπορεί να ρυθμιστεί από 0 - 60 Ηz. · Για λειτουργία σε χαμηλές στροφές με διανυσματικό
έλεγχο, να τεθεί ‘παρ. 13’ = 0.01 Hz. |
|
14 |
Selection of applied load |
Επιλογή της V/f χαρακτηριστικής ανάλογα με το φορτίο και τη ροπή που
αυτό εμφανίζει. · "0" για φορτία σταθερής ροπής (π.χ.
ταινιόδρομους) · "1" για φορτία μεταβλητής ροπής (π.χ.
αντλίες, ανεμιστήρες) · "2" ή "3" για κατακόρυφα
φορτία (ενίσχυση στο ανέβασμα ή το κατέβασμα) · Βλέπε σελ. 58 του manual για περισσότερες
λεπτομέρειες. |
|
18 |
Upper limit frequency for high speed
operation |
Ρύθμιση της ανώτατης επιτρεπτής συχνότητας, εάν ο κινητήρας πρόκειται
να λειτουργήσει σε συχνότητες μεγαλύτερες από 120 Hz. |
|
29 |
Selection of acceleration/deceleration
pattern |
Διαφοροποίηση της επιτάχυνσης, ανάλογα με την εφαρμογή. |
|
80 |
Motor capacity (kW) |
Ο διανυσματικός έλεγχος μαγνητικής ροής (general purpose magnetic
flux vector control) μπορεί να επιλεγεί απλά εισάγοντας την ονομαστική ισχύ της μηχανής στην παρ. 80.
Εάν ‘παρ. 80’ = 9999, τότε χρησιμοποιείται έλεγχος της ροής διακένου (V/f =
σταθ.). Ο διανυσματικός έλεγχος είναι αποτελεσματικός σε εφαρμογές που
απαιτούν υψηλή ροπή εκκίνησης, ή όταν το φορτίο μεταβάλλεται. Oι ακόλουθες προϋποθέσεις πρέπει να πληρούνται για να χρησιμοποιηθεί
ο διανυσματικός έλεγχος. Εάν δεν πληρούνται, τότε ανεπαρκής ροπή, ασταθής περιστροφή
και άλλα προβλήματα μπορεί να παρουσιαστούν. Σ’αυτή την περίπτωση, να
χρησιμοποιηθεί έλεγχος V/f: · Η ισχύς της
μηχανής είναι ίση ή μικρότερη κατά μία τάξη από την ισχύ του αντιστροφέα. · Ο αριθμός των
πόλων είναι 2, 4 ή 6. (δε χρειάζεται να καθοριστεί.) · Κάθε μηχανή
ελέγχεται από το δικό της αντιστροφέα. · Το μήκος των
καλωδίων μεταξύ αντιστροφέα και μηχανής είναι μικρότερο από 30 m. · Η παρ. 19 περιέχει
την ονομαστική τάση της μηχανής. Παρατηρήσεις: · Η περιστροφή της
μηχανής μπορεί να παρουσιάζει κάποιες ανωμαλίες. · Μία καθυστέρηση
της τάξης των 0.2 s στην εκκίνηση οφείλεται στον υπολογισμό διαφόρων
δεδομένων ελέγχου. |
4. ΠΡΑΚΤΙΚΗ ΕΦΑΡΜΟΓΗ
Για την άσκηση να γίνουν τα ακόλουθα:
1. Να εκκινήσετε τον
κινητήρα μέσω του PC μεταβάλλοντας την συχνότητα από 0-50Ηz.
2. Εκκινήστε (FWD)
και ακινητοποιήστε (STOP) τον κινητήρα μέσω του πληκτρολογίου.
3. Εκκινήστε (FWD)
τον κινητήρα με επιτάχυνση 20sec και ακινητοποιήστε (STOP) τον κινητήρα με επιβράδυνση 20sec. Παρακολουθήστε την
on-line γραφική παρακολούθηση το ρεύματος
του κινητήρα και της συχνότητας λειτουργίας του αντιστροφέα.
4. Εκκινήστε (FWD)
τον κινητήρα με επιτάχυνση 0sec και ακινητοποιήστε (STOP) τον κινητήρα με επιβράδυνση 0sec. Παρακολουθήστε την
on-line γραφική παρακολούθηση το
ρεύματος του κινητήρα και της συχνότητας λειτουργίας του αντιστροφέα.
5. Να αλλάζεται τη
συχνότητα του φέροντος σήματος (carrier) της μεθόδου PWM
(π.χ. fc= 1KHz, fc= 2KHz, fc= 12KHz).
Τι επιτυγχάνουμε μ’ αυτό τον τρόπο; Η ρύθμιση αυτή γίνεται μέσω της παραμέτρου
72.
6. Υπολογισμός του λόγου
V/f του συγκεκριμένου
μετατροπέα. Ο κινητήρας είναι χωρίς φορτίο. Μεταβάλλουμε τη συχνότητα της τάσης
εξόδου του μετατροπέα από 5Hz έως τη μέγιστη συχνότητα
λειτουργίας του κινητήρα με βήματα των 10Hz και ταυτόχρονα
μετράμε την πολική τάση εξόδου του αντιστροφέα (θεμελιώδη).